diff --git "a/1 \346\246\202\350\256\272.md" "b/1 \346\246\202\350\256\272.md"
index 94e871e..8bc38a2 100644
--- "a/1 \346\246\202\350\256\272.md"
+++ "b/1 \346\246\202\350\256\272.md"
@@ -8,11 +8,7 @@
彩色图象可以用红、绿、蓝三元组的二维矩阵来表示。通常,三元组的每个数值也是在0到255之间,0表示相应的基色在该象素中没有,而255则代表相应的基色在该象素中取得最大值,这种情况下每个象素可用三个字节来表示。
## 1.2.数字图象处理系统的基本组成结构
-
-```mermaid
-graph LR;
图像数字化设备--输入图像-->图像处理计算机--输出图像-->图像输出设备
-```
- 图象数字化设备:扫描仪、数码相机、 摄象机与图象采集卡等
@@ -78,8 +74,8 @@ graph LR;
摄取图像 光电转换 数字化
图像的数字化
- 如何将一幅光学图像表示成一组数字既不失真又便于计算机分析处理。
- 主要包括的是图像的采样与量化。
+ 如何将一幅光学图像表示成一组数字既不失真又便于计算机分析处理。
+ 主要包括的是图像的采样与量化。
### 图像存储
@@ -114,7 +110,7 @@ graph LR;
### 图像隐藏
- 是指媒体信息的相互隐藏。
+是指媒体信息的相互隐藏。
1)数字水印
2)图像的信息伪装
diff --git "a/2 \351\242\221\345\237\237\345\244\204\347\220\206.md" "b/2 \351\242\221\345\237\237\345\244\204\347\220\206.md"
index 14ea772..4d667bd 100644
--- "a/2 \351\242\221\345\237\237\345\244\204\347\220\206.md"
+++ "b/2 \351\242\221\345\237\237\345\244\204\347\220\206.md"
@@ -1,7 +1,4 @@
# 2.1 频域世界与频域变换
-
- -
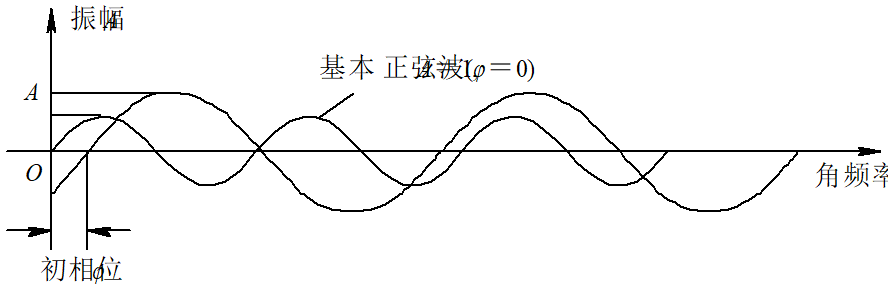
图2-1 任意波形可分解为正弦波的加权和
@@ -10,7 +7,7 @@
-
图2-1 任意波形可分解为正弦波的加权和

@@ -10,7 +7,7 @@
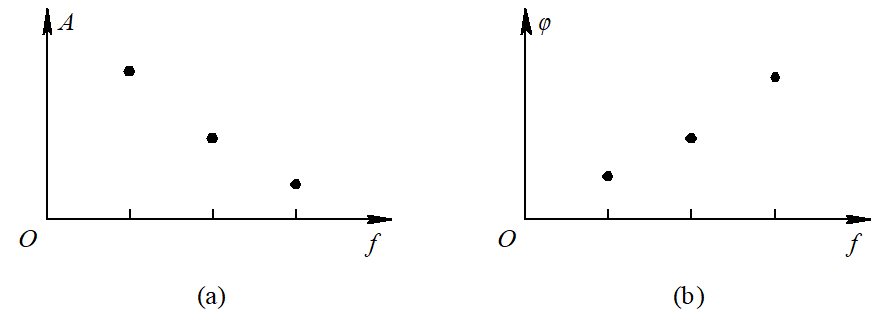 -图2-3 图2-1(a)波形的频域表示
+图2-3 图2-1(a)波形的频域表示
(a) 幅频特性; (b) 相频特性
时域和频域之间的变换可用数学公式表示如下:
@@ -171,8 +168,8 @@ $$
| 平均值 | $\overline{f(x, y)}=\frac{1}{M N} \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y)=\frac{1}{M N} F(0,0)$ |
| 卷积定理 | $\begin{aligned} & f(x, y) * h(x, y) \Leftrightarrow F(u, v) \cdot H(u, v) \\ & f(x, y) \cdot h(x, y) \Leftrightarrow F(u, v) * H(u, v)\end{aligned}$ |
| 相关定理——互相关 | $\begin{aligned} & f(x, y) \circ g(x, y) \Leftrightarrow F(u, v) \bullet G^*(u, v) \\ & f(x, y) \bullet g^*(x, y) \Leftrightarrow F(u, v) \circ H(u, v)\end{aligned}$ |
-| 相关定理——自相关 | $\begin{aligned} & f(x, y) \circ f(x, y) \Leftrightarrow|F(u, v)|^2 \\ & |f(x, y)|^2 \Leftrightarrow F(u, v) \circ F(u, v)\end{aligned}$ |
-
+| 相关定理——自相关 | $\begin{aligned} & f(x, y) \circ f(x, y) \Leftrightarrow F(u, v)|^2 \\ & |f(x, y)|^2 \Leftrightarrow F(u, v) \circ F(u, v)\end{aligned}$ |
+==表格的最后一行公式应该没对==
### 可分离性
@@ -341,13 +338,14 @@ F_e(3)=F_{e e}(1)-W_8^2 F_{e o}(1)
$$
$$
+\begin{aligned}
& \left\{\begin{array}{l}
F_o(0)=F_{o e}(0)+W_8^0 F_{o o}(0) \\
F_o(1)=F_{o e}(1)-W_8^2 F_{o o}(1) \\
F_o(2)=F_{o e}(0)-W_8^0 F_{o o}(0)\\
F_e(3)=F_{o e}(1)-W_8^2 F_{o o}(1)
\end{array}\right. \\
-&\tag{2-35b}
+\end{aligned}\tag{2-35b}
$$
-图2-3 图2-1(a)波形的频域表示
+图2-3 图2-1(a)波形的频域表示
(a) 幅频特性; (b) 相频特性
时域和频域之间的变换可用数学公式表示如下:
@@ -171,8 +168,8 @@ $$
| 平均值 | $\overline{f(x, y)}=\frac{1}{M N} \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y)=\frac{1}{M N} F(0,0)$ |
| 卷积定理 | $\begin{aligned} & f(x, y) * h(x, y) \Leftrightarrow F(u, v) \cdot H(u, v) \\ & f(x, y) \cdot h(x, y) \Leftrightarrow F(u, v) * H(u, v)\end{aligned}$ |
| 相关定理——互相关 | $\begin{aligned} & f(x, y) \circ g(x, y) \Leftrightarrow F(u, v) \bullet G^*(u, v) \\ & f(x, y) \bullet g^*(x, y) \Leftrightarrow F(u, v) \circ H(u, v)\end{aligned}$ |
-| 相关定理——自相关 | $\begin{aligned} & f(x, y) \circ f(x, y) \Leftrightarrow|F(u, v)|^2 \\ & |f(x, y)|^2 \Leftrightarrow F(u, v) \circ F(u, v)\end{aligned}$ |
-
+| 相关定理——自相关 | $\begin{aligned} & f(x, y) \circ f(x, y) \Leftrightarrow F(u, v)|^2 \\ & |f(x, y)|^2 \Leftrightarrow F(u, v) \circ F(u, v)\end{aligned}$ |
+==表格的最后一行公式应该没对==
### 可分离性
@@ -341,13 +338,14 @@ F_e(3)=F_{e e}(1)-W_8^2 F_{e o}(1)
$$
$$
+\begin{aligned}
& \left\{\begin{array}{l}
F_o(0)=F_{o e}(0)+W_8^0 F_{o o}(0) \\
F_o(1)=F_{o e}(1)-W_8^2 F_{o o}(1) \\
F_o(2)=F_{o e}(0)-W_8^0 F_{o o}(0)\\
F_e(3)=F_{o e}(1)-W_8^2 F_{o o}(1)
\end{array}\right. \\
-&\tag{2-35b}
+\end{aligned}\tag{2-35b}
$$
 @@ -385,12 +383,11 @@ $$
## 2.3.1 可分离变换
-二维傅立叶变换可用通用的关系式来表示:
-$$
- F(u, v)=\sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y) g(x, y, u, v)
+二维傅立叶变换可用通用的关系式来表示:
+$$
+ F(u, v)=\sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y) g(x, y, u, v)\tag{2-36}
+ $$
-\tag{2-36}
-$$
$$
f(x, y)=\sum_{u=0}^{M-1} \sum_{v=0}^{N-1} F(u, v) h(x, y, u, v)\tag{2-37}
$$
@@ -706,9 +703,7 @@ a_{11} B & a_{12} B & \Lambda & a_{1 n} B \\
a_{21} B & a_{22} B & \Lambda & a_{2 n} B \\
M & M & M & M \\
a_{m 1} B & a_{m 2} B & \Lambda & a_{m n} B
-\end{array}\right] \\
-
-\tag{2-68}
+\end{array}\right] \tag{2-68}
$$
$$
@@ -830,8 +825,7 @@ W_{1} & =\frac{1}{4^{2}}\left[\begin{array}{cccc}
1 & -1 & 1 & -1 \\
1 & 1 & -1 & -1 \\
1 & -1 & -1 & 1
-\end{array}\right] \\
-& =\left[\begin{array}{llll}
+\end{array}\right]=\left[\begin{array}{llll}
2 & 0 & 0 & -1 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 \\
@@ -858,9 +852,7 @@ W_{2}=\frac{1}{4^{2}}\left[\begin{array}{cccc}
1 & -1 & 1 & -1 \\
1 & 1 & -1 & -1 \\
1 & -1 & -1 & 1
-\end{array}\right]
-
-=\left[\begin{array}{llll}
+\end{array}\right]=\left[\begin{array}{llll}
1 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 \\
@@ -871,6 +863,8 @@ $$
再如, 图2-12是一幅数字图像及对其进行二维WHT变换的结果。
@@ -385,12 +383,11 @@ $$
## 2.3.1 可分离变换
-二维傅立叶变换可用通用的关系式来表示:
-$$
- F(u, v)=\sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y) g(x, y, u, v)
+二维傅立叶变换可用通用的关系式来表示:
+$$
+ F(u, v)=\sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y) g(x, y, u, v)\tag{2-36}
+ $$
-\tag{2-36}
-$$
$$
f(x, y)=\sum_{u=0}^{M-1} \sum_{v=0}^{N-1} F(u, v) h(x, y, u, v)\tag{2-37}
$$
@@ -706,9 +703,7 @@ a_{11} B & a_{12} B & \Lambda & a_{1 n} B \\
a_{21} B & a_{22} B & \Lambda & a_{2 n} B \\
M & M & M & M \\
a_{m 1} B & a_{m 2} B & \Lambda & a_{m n} B
-\end{array}\right] \\
-
-\tag{2-68}
+\end{array}\right] \tag{2-68}
$$
$$
@@ -830,8 +825,7 @@ W_{1} & =\frac{1}{4^{2}}\left[\begin{array}{cccc}
1 & -1 & 1 & -1 \\
1 & 1 & -1 & -1 \\
1 & -1 & -1 & 1
-\end{array}\right] \\
-& =\left[\begin{array}{llll}
+\end{array}\right]=\left[\begin{array}{llll}
2 & 0 & 0 & -1 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 \\
@@ -858,9 +852,7 @@ W_{2}=\frac{1}{4^{2}}\left[\begin{array}{cccc}
1 & -1 & 1 & -1 \\
1 & 1 & -1 & -1 \\
1 & -1 & -1 & 1
-\end{array}\right]
-
-=\left[\begin{array}{llll}
+\end{array}\right]=\left[\begin{array}{llll}
1 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 \\
@@ -871,6 +863,8 @@ $$
再如, 图2-12是一幅数字图像及对其进行二维WHT变换的结果。
 +
+==这里图片是上传了本地图片吗,加载不了==
图2-12二维WHT结果
(a)原图像;(b) WHT结果
@@ -1131,8 +1125,7 @@ m_matBits = mabs(ff);
+
+==这里图片是上传了本地图片吗,加载不了==
图2-12二维WHT结果
(a)原图像;(b) WHT结果
@@ -1131,8 +1125,7 @@ m_matBits = mabs(ff);
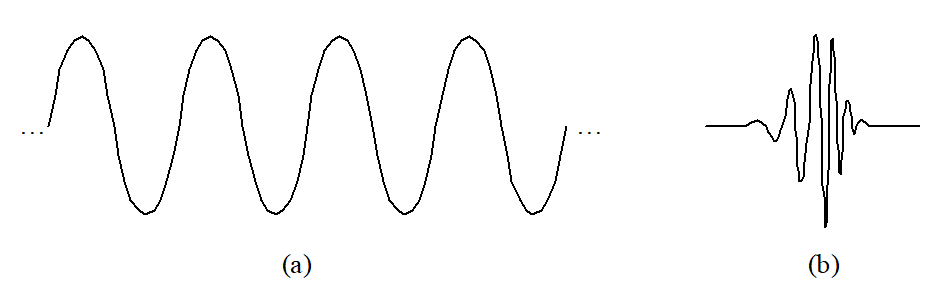 图2-13 正弦波和小波
-(a)正弦波曲线;
-(b) 小波曲线
+(a)正弦波曲线;(b) 小波曲线
从小波和正弦波的形状可以看出, 变化剧烈的信号, 用不规则的小波进行分析比用平滑的正弦波更好, 即用小波更能描述信号的局部特征。
@@ -1152,7 +1145,7 @@ $$
图2-14 小波的缩放操作
(2) 平移。简单地讲, 平移就是小波的延迟或超前。在数学上, 函数 $f(t)$ 延迟 $k$ 的表达式为 $f(t-k)$, 如图2-15所示。
-
+==这张图片打开好像啥都没有==
图2-13 正弦波和小波
-(a)正弦波曲线;
-(b) 小波曲线
+(a)正弦波曲线;(b) 小波曲线
从小波和正弦波的形状可以看出, 变化剧烈的信号, 用不规则的小波进行分析比用平滑的正弦波更好, 即用小波更能描述信号的局部特征。
@@ -1152,7 +1145,7 @@ $$
图2-14 小波的缩放操作
(2) 平移。简单地讲, 平移就是小波的延迟或超前。在数学上, 函数 $f(t)$ 延迟 $k$ 的表达式为 $f(t-k)$, 如图2-15所示。
-
+==这张图片打开好像啥都没有==
 (a) 小波函数 $\psi(t)$; (b) 位移后的小波函数 $\psi(t-k)$
@@ -1208,7 +1201,7 @@ CWT计算主要有如下五个步骤:
图2-20 多级信号分解示意图
(a) 信号分解; (b) 小波分数; (c)小波分解树
-
+==这张图也看不了==
(a) 小波函数 $\psi(t)$; (b) 位移后的小波函数 $\psi(t-k)$
@@ -1208,7 +1201,7 @@ CWT计算主要有如下五个步骤:
图2-20 多级信号分解示意图
(a) 信号分解; (b) 小波分数; (c)小波分解树
-
+==这张图也看不了==
 图2-21 小波分解下采样示意图
@@ -1268,7 +1261,7 @@ $$
5. 二维离散小波变换
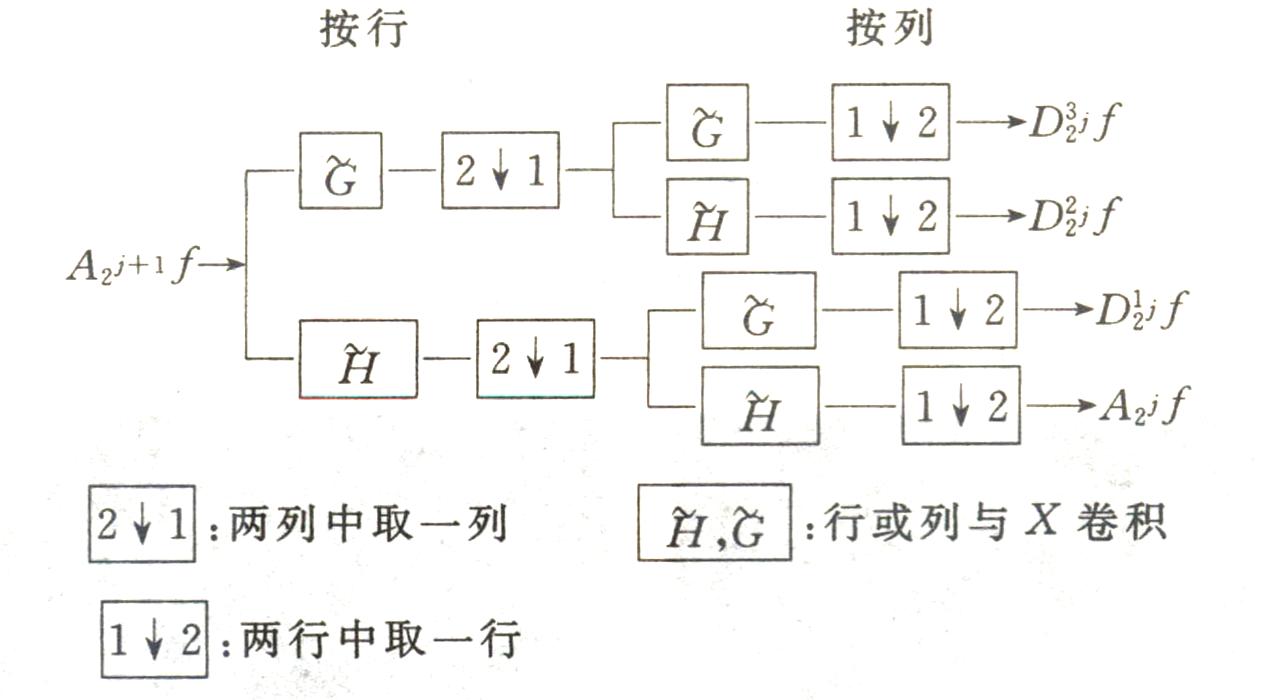
二维离散小波变换是一维离散小波变换的推广,其实质上是将二维信号在不同尺度上的分解, 得到原始信号的近似值和细节值。由于信号是二维的, 因此分解也是二维的。分解的结果为:近似分量cA、水平细节分量 $cH$ 、垂直细节分量cV和对角细节分量cD。同样也可以利用二维小波分解的结果在不同尺度上重构信号。二维小波分解和重构过程如图2-27所示。
-
+==这张图也看不了==
图2-21 小波分解下采样示意图
@@ -1268,7 +1261,7 @@ $$
5. 二维离散小波变换
二维离散小波变换是一维离散小波变换的推广,其实质上是将二维信号在不同尺度上的分解, 得到原始信号的近似值和细节值。由于信号是二维的, 因此分解也是二维的。分解的结果为:近似分量cA、水平细节分量 $cH$ 、垂直细节分量cV和对角细节分量cD。同样也可以利用二维小波分解的结果在不同尺度上重构信号。二维小波分解和重构过程如图2-27所示。
-
+==这张图也看不了==
 图2-27二维小波分解和重构过程示意图
diff --git "a/3 \345\233\276\345\203\217\347\274\226\347\240\201.md" "b/3 \345\233\276\345\203\217\347\274\226\347\240\201.md"
index 0fd8586..0b20a8e 100644
--- "a/3 \345\233\276\345\203\217\347\274\226\347\240\201.md"
+++ "b/3 \345\233\276\345\203\217\347\274\226\347\240\201.md"
@@ -7,7 +7,6 @@
1. 压缩用于通讯
2. 加密,保证安全性
-[TOC]
# 3.1 图像编码概述
@@ -102,7 +101,7 @@ $$
- 第一代压缩编码
八十年代以前, 主要是根据传统的信源编码方法。
-
+==图片看不到==
图2-27二维小波分解和重构过程示意图
diff --git "a/3 \345\233\276\345\203\217\347\274\226\347\240\201.md" "b/3 \345\233\276\345\203\217\347\274\226\347\240\201.md"
index 0fd8586..0b20a8e 100644
--- "a/3 \345\233\276\345\203\217\347\274\226\347\240\201.md"
+++ "b/3 \345\233\276\345\203\217\347\274\226\347\240\201.md"
@@ -7,7 +7,6 @@
1. 压缩用于通讯
2. 加密,保证安全性
-[TOC]
# 3.1 图像编码概述
@@ -102,7 +101,7 @@ $$
- 第一代压缩编码
八十年代以前, 主要是根据传统的信源编码方法。
-
+==图片看不到==
 - 第二代压缩编码
@@ -308,7 +307,6 @@ $$
\hline S_7 & 0.04 & 5 & 0.96 & 1111010 & 11110 \\
\hline
\end{array}\\
-
$$
除此之外, 还有二分法香农-范诺编码方法。其步骤如下:
(1) 首先统计出每个符号出现的概率;
@@ -528,7 +526,7 @@ $$
二维小波分解
-
+==图片加载不出来==

二维小波重建
@@ -560,7 +558,6 @@ $$
Huffman编码:
$$
f=01\quad e=11 \quad a=10 \quad b=001\quad c=0001\quad d=0000\\
-
$$
编码为
$$
@@ -576,20 +573,16 @@ $$
## 图像压缩的实例
-一:
-
-一次小波变换+DCT变换.行程编码+Huffman编码
+一:一次小波变换+DCT变换.行程编码+Huffman编码
-二:
-
-一次小波变换+差值编码+变字长行程编码+Huffman编码
+二:一次小波变换+差值编码+变字长行程编码+Huffman编码
### 算法 1
| 原图 | 复原图 |
| ------------------------------------------------------------ | ------------------------------------------------------------ |
|
- 第二代压缩编码
@@ -308,7 +307,6 @@ $$
\hline S_7 & 0.04 & 5 & 0.96 & 1111010 & 11110 \\
\hline
\end{array}\\
-
$$
除此之外, 还有二分法香农-范诺编码方法。其步骤如下:
(1) 首先统计出每个符号出现的概率;
@@ -528,7 +526,7 @@ $$

二维小波分解
-
+==图片加载不出来==

二维小波重建
@@ -560,7 +558,6 @@ $$
Huffman编码:
$$
f=01\quad e=11 \quad a=10 \quad b=001\quad c=0001\quad d=0000\\
-
$$
编码为
$$
@@ -576,20 +573,16 @@ $$
## 图像压缩的实例
-一:
-
-一次小波变换+DCT变换.行程编码+Huffman编码
+一:一次小波变换+DCT变换.行程编码+Huffman编码
-二:
-
-一次小波变换+差值编码+变字长行程编码+Huffman编码
+二:一次小波变换+差值编码+变字长行程编码+Huffman编码
### 算法 1
| 原图 | 复原图 |
| ------------------------------------------------------------ | ------------------------------------------------------------ |
|  |
|  |
-
+==图片看不了==
信噪比:66.02
压缩比:11.83:1
@@ -599,7 +592,7 @@ $$
| 原图 | 复原图 |
| ------------------------------------------------------------ | ------------------------------------------------------------ |
| |
|
-
+==图片看不了==
信噪比:66.02
压缩比:11.83:1
@@ -599,7 +592,7 @@ $$
| 原图 | 复原图 |
| ------------------------------------------------------------ | ------------------------------------------------------------ |
| |  |
-
+==第一张图片看不了==
信噪比:64.55
压缩比:26.50:1
@@ -774,8 +767,8 @@ $$


-
-3.11.2 JPEG编码实例
+==后面几张图片没有==
+3.11.2 JPEG编码实例
下面结合一个实例来讲述JPEG基本系统的编码过程。设有一图像亮度数据块如图3-7所示,对其进行离散余弦变换后, 用图3-4所示的亮度量化表对系数矩阵量化后的结果如图3-8所示。对量化结果按图3-6所示的顺序进行Z形扫描, 并对扫描结果的DC及AC系数进行编码的结果见表3-12。由于数据较多, 为简便起见, 这里只对几个系数的编码加以说明。
diff --git "a/4 \345\233\276\345\203\217\345\242\236\345\274\272.md" "b/4 \345\233\276\345\203\217\345\242\236\345\274\272.md"
index 8e34203..bc714c5 100644
--- "a/4 \345\233\276\345\203\217\345\242\236\345\274\272.md"
+++ "b/4 \345\233\276\345\203\217\345\242\236\345\274\272.md"
@@ -172,7 +172,6 @@ $$
再把结果代入(4-5)式有
$$
-
p_s(s) =\left[p_r(r) \cdot \frac{d r}{d s}\right]_{r=T^{-1}(s)}=\left[p_r(r) \cdot \frac{1}{d s / d r}\right]_{r=T^{-1}(s)}
=\left[p_r(r) \cdot \frac{1}{p_r(r)}\right]=1
\tag{4-8}
@@ -238,18 +237,15 @@ $$
\end{aligned}
$$
-
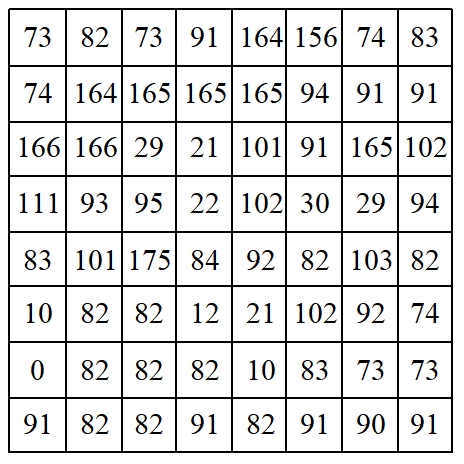
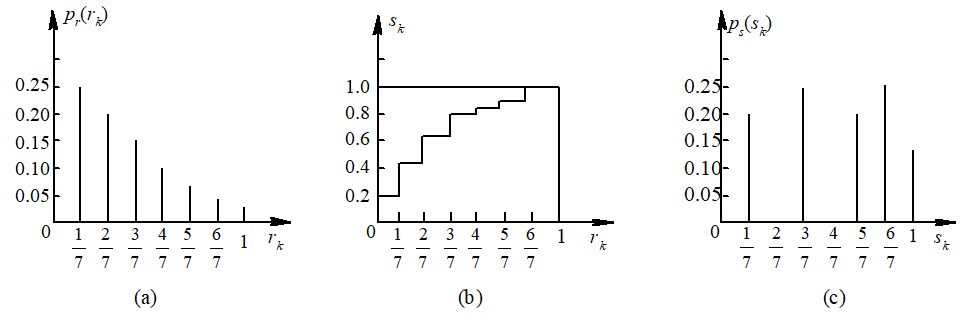
图4-10 直方图均衡化处理
处理过程如下:
由式(4-10)可得到变换函数
$$
-
s_0=T\left(r_0\right)=\sum_{j=0}^0 P_r\left(r_j\right)=P_r\left(r_0\right)=0.19 \\
s_1=T\left(r_1\right)=\sum_{j=0}^1 P_r\left(r_j\right)=P_r\left(r_0\right)+P_r\left(r_1\right)=0.44 \\
s_2=T\left(r_2\right)=\sum_{j=0}^2 P_r\left(r_j\right)=P_r\left(r_0\right)+P_r\left(r_1\right)+P_r\left(r_2\right)=0.65 \\
s_3=T\left(r_3\right)=\sum_{j=0}^3 P_r\left(r_j\right)=P_r\left(r_0\right)+P_r\left(r_1\right)+P_r\left(r_2\right)+P_r\left(r_3\right)=0.81
-
$$
依此类推:$S_4=0.89, \quad s 5=0.95, \quad ~s_6=0.98, \quad ~s_7=1.0$ 。
@@ -318,7 +314,7 @@ P_g(g)=\frac{1}{g_{\max }-g_{\min }}, g_{\max } \geq g \geq g_{\min} & g=\left[g
\hline
\end{array}
$$
-
+==没正确显示出来==
典型直方图变换的转移函数
@@ -525,10 +521,10 @@ $$
经过模板操作后的图像为
$$
\left[\begin{array}{ccccc}
-- & - & - & - & - \\
-- & 2 & 2 & 2 & - \\
-- & 3 & 3 & 3 & - \\
-- & - & - & - & -
+ \\- & - & - & - & - \\
+\\- & 2 & 2 & 2 & - \\
+\\- & 3 & 3 & 3 & - \\
+\\- & - & - & - & -
\end{array}\right]
$$
“-”表示无法进行模板操作的像素点。
@@ -585,7 +581,7 @@ g(x, y)=\frac{1}{M} \sum_{(i, j) \in s} f(i, j)\tag{4-17}
$$
式中: $x, y=0,1, \ldots, N-1 ; S$ 是以 $(x, y)$ 为中心的邻域的集合, $M$ 是 $S$ 内的点数。
-邻域平均法的思想是通过一点和邻域内像素点求平均来去除突变的像素点,从而滤掉一定的噪声,其主要优点是算法简单,计算速度快, 但其代价是会造成图像一定程度上的模糊。
+邻域平均法的思想是通过一点和邻域内像素点求平均来去除突变的像素点,从而滤掉一定的噪声,其主要优点是算法简单,计算速度快, 但其代价是会造成图像一定程度上的模糊。
采用邻域平均法对图4-19(*a*)中的图像进行处理后的结果如图4-19(*b*)所示。可以看出经过邻域平均法处理后,虽然图像的噪声得到了抑制,但图像变得相对模糊了。
@@ -925,16 +921,13 @@ d_x=\left[\begin{array}{rrr}
-1 & 0 & 1 \\
-2 & 0 & 2 \\
-1 & 0 & 1
-\end{array}\right]&d_y=\left[\begin{array}{ccc}
+\end{array}\right] d_y=\left[\begin{array}{ccc}
-1 & -2 & -1 \\
0 & 0 & 0 \\
1 & 2 & 1
\end{array}\right]\tag{4-39}
$$
-$$
-
-$$
Roberts梯度锐化效果图例
@@ -958,7 +951,7 @@ d_x=\left[\begin{array}{ccc}
-1 & 0 & 1 \\
-1 & 0 & 1
\end{array}\right]
-&d_y=\left[\begin{array}{ccc}
+d_y=\left[\begin{array}{ccc}
-1 & -1 & -1 \\
0 & 0 & 0 \\
1 & 1 & 1
@@ -1162,6 +1155,7 @@ $$
|
-
+==第一张图片看不了==
信噪比:64.55
压缩比:26.50:1
@@ -774,8 +767,8 @@ $$


-
-3.11.2 JPEG编码实例
+==后面几张图片没有==
+3.11.2 JPEG编码实例
下面结合一个实例来讲述JPEG基本系统的编码过程。设有一图像亮度数据块如图3-7所示,对其进行离散余弦变换后, 用图3-4所示的亮度量化表对系数矩阵量化后的结果如图3-8所示。对量化结果按图3-6所示的顺序进行Z形扫描, 并对扫描结果的DC及AC系数进行编码的结果见表3-12。由于数据较多, 为简便起见, 这里只对几个系数的编码加以说明。

diff --git "a/4 \345\233\276\345\203\217\345\242\236\345\274\272.md" "b/4 \345\233\276\345\203\217\345\242\236\345\274\272.md"
index 8e34203..bc714c5 100644
--- "a/4 \345\233\276\345\203\217\345\242\236\345\274\272.md"
+++ "b/4 \345\233\276\345\203\217\345\242\236\345\274\272.md"
@@ -172,7 +172,6 @@ $$
再把结果代入(4-5)式有
$$
-
p_s(s) =\left[p_r(r) \cdot \frac{d r}{d s}\right]_{r=T^{-1}(s)}=\left[p_r(r) \cdot \frac{1}{d s / d r}\right]_{r=T^{-1}(s)}
=\left[p_r(r) \cdot \frac{1}{p_r(r)}\right]=1
\tag{4-8}
@@ -238,18 +237,15 @@ $$
\end{aligned}
$$

-
图4-10 直方图均衡化处理
处理过程如下:
由式(4-10)可得到变换函数
$$
-
s_0=T\left(r_0\right)=\sum_{j=0}^0 P_r\left(r_j\right)=P_r\left(r_0\right)=0.19 \\
s_1=T\left(r_1\right)=\sum_{j=0}^1 P_r\left(r_j\right)=P_r\left(r_0\right)+P_r\left(r_1\right)=0.44 \\
s_2=T\left(r_2\right)=\sum_{j=0}^2 P_r\left(r_j\right)=P_r\left(r_0\right)+P_r\left(r_1\right)+P_r\left(r_2\right)=0.65 \\
s_3=T\left(r_3\right)=\sum_{j=0}^3 P_r\left(r_j\right)=P_r\left(r_0\right)+P_r\left(r_1\right)+P_r\left(r_2\right)+P_r\left(r_3\right)=0.81
-
$$
依此类推:$S_4=0.89, \quad s 5=0.95, \quad ~s_6=0.98, \quad ~s_7=1.0$ 。
@@ -318,7 +314,7 @@ P_g(g)=\frac{1}{g_{\max }-g_{\min }}, g_{\max } \geq g \geq g_{\min} & g=\left[g
\hline
\end{array}
$$
-
+==没正确显示出来==
典型直方图变换的转移函数
@@ -525,10 +521,10 @@ $$
经过模板操作后的图像为
$$
\left[\begin{array}{ccccc}
-- & - & - & - & - \\
-- & 2 & 2 & 2 & - \\
-- & 3 & 3 & 3 & - \\
-- & - & - & - & -
+ \\- & - & - & - & - \\
+\\- & 2 & 2 & 2 & - \\
+\\- & 3 & 3 & 3 & - \\
+\\- & - & - & - & -
\end{array}\right]
$$
“-”表示无法进行模板操作的像素点。
@@ -585,7 +581,7 @@ g(x, y)=\frac{1}{M} \sum_{(i, j) \in s} f(i, j)\tag{4-17}
$$
式中: $x, y=0,1, \ldots, N-1 ; S$ 是以 $(x, y)$ 为中心的邻域的集合, $M$ 是 $S$ 内的点数。
-邻域平均法的思想是通过一点和邻域内像素点求平均来去除突变的像素点,从而滤掉一定的噪声,其主要优点是算法简单,计算速度快, 但其代价是会造成图像一定程度上的模糊。
+邻域平均法的思想是通过一点和邻域内像素点求平均来去除突变的像素点,从而滤掉一定的噪声,其主要优点是算法简单,计算速度快, 但其代价是会造成图像一定程度上的模糊。
采用邻域平均法对图4-19(*a*)中的图像进行处理后的结果如图4-19(*b*)所示。可以看出经过邻域平均法处理后,虽然图像的噪声得到了抑制,但图像变得相对模糊了。
@@ -925,16 +921,13 @@ d_x=\left[\begin{array}{rrr}
-1 & 0 & 1 \\
-2 & 0 & 2 \\
-1 & 0 & 1
-\end{array}\right]&d_y=\left[\begin{array}{ccc}
+\end{array}\right] d_y=\left[\begin{array}{ccc}
-1 & -2 & -1 \\
0 & 0 & 0 \\
1 & 2 & 1
\end{array}\right]\tag{4-39}
$$
-$$
-
-$$
Roberts梯度锐化效果图例
@@ -958,7 +951,7 @@ d_x=\left[\begin{array}{ccc}
-1 & 0 & 1 \\
-1 & 0 & 1
\end{array}\right]
-&d_y=\left[\begin{array}{ccc}
+d_y=\left[\begin{array}{ccc}
-1 & -1 & -1 \\
0 & 0 & 0 \\
1 & 1 & 1
@@ -1162,6 +1155,7 @@ $$
 +==图片没有==
图4-33 拉普拉斯锐化结果
(a) 二值图像; (b) 拉普拉斯运算结果
@@ -1255,7 +1249,6 @@ $$
E_T=\sum_{u=0}^{N-1} \sum_{v=0}^{N-1} E(u, v) \\
E(u, v)=R^2(u, v)+I^2(u, v) \\
\beta=100\left[\sum_u \sum_v E(u, v) / E_T\right] \\
-
$$
+==图片没有==
图4-33 拉普拉斯锐化结果
(a) 二值图像; (b) 拉普拉斯运算结果
@@ -1255,7 +1249,6 @@ $$
E_T=\sum_{u=0}^{N-1} \sum_{v=0}^{N-1} E(u, v) \\
E(u, v)=R^2(u, v)+I^2(u, v) \\
\beta=100\left[\sum_u \sum_v E(u, v) / E_T\right] \\
-
$$
 @@ -1290,7 +1283,7 @@ $$
@@ -1290,7 +1283,7 @@ $$
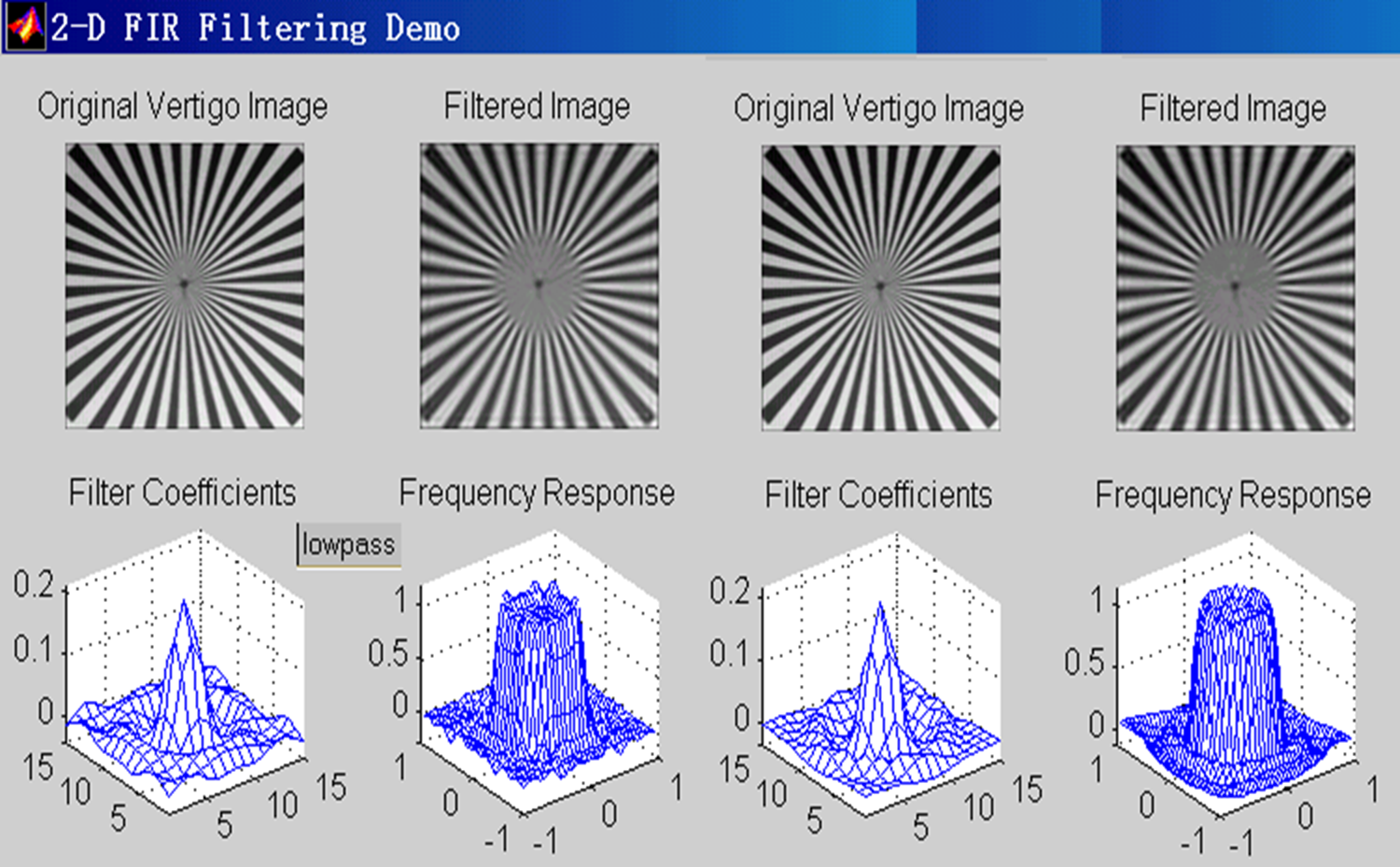 滤波器2
-
+没有图片
滤波器2
-
+没有图片
 ### 巴特沃思滤波器Butterworth
diff --git "a/5 \345\233\276\345\203\217\345\244\215\345\216\237.md" "b/5 \345\233\276\345\203\217\345\244\215\345\216\237.md"
index 0e0c63c..06fd980 100644
--- "a/5 \345\233\276\345\203\217\345\244\215\345\216\237.md"
+++ "b/5 \345\233\276\345\203\217\345\244\215\345\216\237.md"
@@ -324,7 +324,6 @@ $$
-
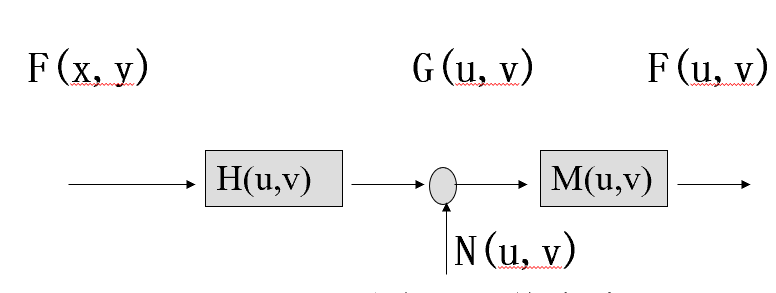
图5.2 逆滤波
@@ -355,8 +354,12 @@ $f(x, y)$ : 原图像; $g(x, y)$ : 模糊图像; $T$ : 暴光时间
设原始图像, 退化图像和噪声分别为 $f(x, y), g(x, y)$ 和 $n(x, y)$, 则 :
$$
-g(x, y)=H[f(x, y)]=H\left[\int_{-\infty}^{+\infty} \int_{-\infty}^{+\infty} f(\alpha, \beta) \delta(x-\alpha, y-\beta) d \alpha d \beta\right]+n(x, y)$ 在给定的 $g(x, y)$ 时, 找出 $f(x, y)$ 的估计 $f(x, y)
+\begin{aligned}
+g(x, y)=H[f(x, y)]=H\left[\int_{-\infty}^{+\infty} \int_{-\infty}^{+\infty} f(\alpha, \beta) \delta(x-\alpha, y-\beta) d \alpha d \beta\right]+n(x, y)
+\end{aligned}
$$
+ 在给定的 $g(x, y)$ 时, 找出 $f(x, y)$ 的估计 $f(x, y)$
+
使:
$$
e^2=E\left\{[f(x, y)-\hat{f}(x, y)]^2\right\}
@@ -586,7 +589,7 @@ $$
## 5.6 几何畸变校正
数字图像在获取过程中,由于成像系统的非线性,成像后的图像与原景物图像相比,会产生比例失调,甚至扭曲,我们把这类图像退化现象称之为几何畸变。典型的几何失真如图5-4所示。
-
+==图片加载不了==
### 巴特沃思滤波器Butterworth
diff --git "a/5 \345\233\276\345\203\217\345\244\215\345\216\237.md" "b/5 \345\233\276\345\203\217\345\244\215\345\216\237.md"
index 0e0c63c..06fd980 100644
--- "a/5 \345\233\276\345\203\217\345\244\215\345\216\237.md"
+++ "b/5 \345\233\276\345\203\217\345\244\215\345\216\237.md"
@@ -324,7 +324,6 @@ $$
-

图5.2 逆滤波
@@ -355,8 +354,12 @@ $f(x, y)$ : 原图像; $g(x, y)$ : 模糊图像; $T$ : 暴光时间
设原始图像, 退化图像和噪声分别为 $f(x, y), g(x, y)$ 和 $n(x, y)$, 则 :
$$
-g(x, y)=H[f(x, y)]=H\left[\int_{-\infty}^{+\infty} \int_{-\infty}^{+\infty} f(\alpha, \beta) \delta(x-\alpha, y-\beta) d \alpha d \beta\right]+n(x, y)$ 在给定的 $g(x, y)$ 时, 找出 $f(x, y)$ 的估计 $f(x, y)
+\begin{aligned}
+g(x, y)=H[f(x, y)]=H\left[\int_{-\infty}^{+\infty} \int_{-\infty}^{+\infty} f(\alpha, \beta) \delta(x-\alpha, y-\beta) d \alpha d \beta\right]+n(x, y)
+\end{aligned}
$$
+ 在给定的 $g(x, y)$ 时, 找出 $f(x, y)$ 的估计 $f(x, y)$
+
使:
$$
e^2=E\left\{[f(x, y)-\hat{f}(x, y)]^2\right\}
@@ -586,7 +589,7 @@ $$
## 5.6 几何畸变校正
数字图像在获取过程中,由于成像系统的非线性,成像后的图像与原景物图像相比,会产生比例失调,甚至扭曲,我们把这类图像退化现象称之为几何畸变。典型的几何失真如图5-4所示。
-
+==图片加载不了==
 图5-4 几种典型的几何失真
diff --git "a/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md" "b/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md"
index 5b18a25..df6fb20 100644
--- "a/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md"
+++ "b/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md"
@@ -847,29 +847,17 @@ int nNewHeight=(long)(max(fabs(fDstY4-fDstY1), fabs(fDstY3-fDstY2))+0.5);
$$
T=T_{1} T_{2}=\left[\begin{array}{ccc}
-
1 & 0 & x_{1} \\
-
0 & 1 & y_{1} \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
1 & 0 & x_{2} \\
-
0 & 1 & y_{2} \\
-
0 & 0 & 1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & x_{1}+x_{2} \\
-
0 & 1 & y_{1}+y_{2} \\
-
0 & 0 & 1
-
\end{array}\right]\tag{6-7}
$$
@@ -881,29 +869,17 @@ $$
$$
T=T_{1} T_{2}=\left[\begin{array}{lll}
-
a_{1} & 0 & 0 \\
-
0 & d_{1} & 0 \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{lll}
-
a_{2} & 0 & 0 \\
-
0 & d_{2} & 0 \\
-
0 & 0 & 1
-
\end{array}\right]=\left[\begin{array}{lll}
-
a_{1} a_{2} & 0 & 0 \\
-
0 & d_{1} d_{2} & 0 \\
-
0 & 0 & 1
-
\end{array}\right]\tag{6-8}
$$
@@ -913,35 +889,20 @@ $$
$$
\begin{aligned}
-
T & =T_{1} T_{2}=\left[\begin{array}{ccc}
-
\cos \theta_{1} & \sin \theta_{1} & 0 \\
-
-\sin \theta_{1} & \cos \theta_{1} & 0 \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
\cos \theta_{2} & \sin \theta_{2} & 0 \\
-
-\sin \theta_{2} & \cos \theta_{2} & 0 \\
-
0 & 0 & 1
-
\end{array}\right] \\
-
& =\left[\begin{array}{ccc}
-
\cos \left(\theta_{1}+\theta_{2}\right) & \sin \left(\theta_{1}+\theta_{2}\right) & 0 \\
-
-\sin \left(\theta_{1}+\theta_{2}\right) & \cos \left(\theta_{1}+\theta_{2}\right) & 0 \\
-
0 & 0 & 1
-
\end{array}\right]
-
\end{aligned}\tag{6-9}
$$
@@ -966,13 +927,9 @@ $$
在这里还要说明一点, 为了提高双线性插值的速度, 双线性插值也可以分解为三个线性插值来实现, 公式如下:
$$
\begin{aligned}
-
& f(x, 0)=f(0,0)+x[f(1,0)-f(0,0)] \\
-
& f(x, 1)=f(0,1)+x[f(1,1)-f(0,1)] \\
-
& f(x, y)=f(x, 0)+y[f(x, 1)-f(x, 0)]
-
\end{aligned}\tag{6-10}
$$
@@ -989,29 +946,17 @@ $$
两个坐标系之间的坐标变换矩阵表达式为:
$$
\left[\begin{array}{c}
-
x_{\Pi} \\
-
y_{\Pi} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & -a \\
-
0 & -1 & b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x_{I} \\
-
-y_{I} \\
-
+{I} \\
1
-
\end{array}\right]
$$
@@ -1019,29 +964,17 @@ $$
$$
\left[\begin{array}{c}
-
x_{I} \\
-
y_{I} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & a \\
-
0 & -1 & b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x_{\Pi} \\
-
y_{\Pi} \\
-
1
-
\end{array}\right]
$$
@@ -1095,81 +1028,46 @@ y_{0} \\
\tag{6-11}
$$
-$$
-
-$$
其逆变换表达式为
$$
\left[\begin{array}{c}
-
x_{0} \\
-
y_{0} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & -a \\
-
0 & -1 & b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
\cos \theta & \sin \theta & 0 \\
-
-\sin \theta & \cos \theta & 0 \\
-
0 & 0 & 0
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
1 & 0 & -c \\
-
0 & -1 & d \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x \\
-
y \\
-
1
-
\end{array}\right]\tag{6-12}
$$
即
$$
\left[\begin{array}{c}
-
x_{0} \\
-
y_{0} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
\cos \theta & \sin \theta & -c \cos \theta-d \sin \theta+a \\
-
-\sin \theta & \cos \theta & c \sin \theta-d \cos \theta+b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x \\
-
y \\
-
1
-
\end{array}\right]\tag{6-13}
$$
@@ -1420,19 +1318,19 @@ BOOL CGeoTrans: : Transpose(CDibObject *pDibObject)
case 16:
nMovedBits = 2;
break;
-case 24:
- nMovedBits = 3;
- break;
-case 32:
- nMovedBits = 4;
- break;
+case 24:
+ nMovedBits = 3;
+ break;
+case 32:
+ nMovedBits = 4;
+ break;
}
- // 针对图像每行进行操作
- for(y = 0; y < nOldHeight; y++)
- {
- //指向源图像第y行
- pOldTemp = pOldBits;
- pOldTemp += (nOldHeight -1 -y) * nOldWidthBytes;
+ // 针对图像每行进行操作
+ for(y = 0; y < nOldHeight; y++)
+ {
+ //指向源图像第y行
+ pOldTemp = pOldBits;
+ pOldTemp += (nOldHeight -1 -y) * nOldWidthBytes;
// 针对每行图像每列进行操作
for(x = 0; x < nOldWidth; x++)
{
diff --git "a/7 \345\233\276\345\203\217\345\210\206\345\211\262.md" "b/7 \345\233\276\345\203\217\345\210\206\345\211\262.md"
index d6d9b68..7017844 100644
--- "a/7 \345\233\276\345\203\217\345\210\206\345\211\262.md"
+++ "b/7 \345\233\276\345\203\217\345\210\206\345\211\262.md"
@@ -344,7 +344,7 @@ $$
图 7-9 图像中不同类型的边界
(a)边界;
-(b) 线;
+(b) 线;
(c)折线变化;
(d)缓慢的平滑变化
@@ -455,7 +455,7 @@ $(x, y)$ 空间的同一条直线上的点在 $(\rho, \theta)$ 空间的正弦
1) 将 $(\rho, \theta)$ 空间量化, 得到二维矩阵 $M(\rho, \theta)$, $M(\rho, \theta)$ 是一个累加器, 初始值为 $0, M(\rho, \theta)=0$ 。
-2 ) 对边界上的每一个点 $\left(x_{i}, y_{i}\right)$, 将 $\theta$ 的所有量化值代入式 ( 7-2), 计算相应的 $\rho$, 并且将累加器加1, $M(\rho, \theta)=M(\rho, \theta)+1$ 。
+2) 对边界上的每一个点 $\left(x_{i}, y_{i}\right)$, 将 $\theta$ 的所有量化值代入式 ( 7-2), 计算相应的 $\rho$, 并且将累加器加1, $M(\rho, \theta)=M(\rho, \theta)+1$ 。
3) 将全部 $\left(x_{i}, y_{i}\right)$ 处理后, 分析 $M(\rho, \theta)$, 如果 $M(\rho, \theta) \geq T$, 就认为存在一条有意义的线段, 是该线段的拟合参数。 $T$ 是一个非负整数, 由图像中景物的先验知识决定。
@@ -467,7 +467,7 @@ $(x, y)$ 空间的同一条直线上的点在 $(\rho, \theta)$ 空间的正弦
1. 固定r, 首先将参数空间 $(a, b)$ 量化为等间隔的小区域, 然后针对超过给定阈值的所有边缘点, 对于每个(a,b)将其映射到的参数空间中的小区域中, 记数落到每个小区域的点数。最后, 取具有最大频度的若干小区域的参数作为圆特征的参数;
-2 . $r$ 取不同值, 重复第一步; 最大频度对应参数即为图象中圆参数。}
+2. $r$ 取不同值, 重复第一步; 最大频度对应参数即为图象中圆参数。}
@@ -475,9 +475,13 @@ $(x, y)$ 空间的同一条直线上的点在 $(\rho, \theta)$ 空间的正弦
1、图像分割是将一幅数字图像划分为不交叠的、连通的像素集的过程, 其中一个对应于背景, 其他的则对应于图像中的各个物体。
-2、图像分割可以通过为物体指定其像素或找出物体之间的(或物体和背景之间的)边界的方法来实现。 3 、灰度级阈值处理是一种总能产生闭合的连通边界的简单分割技术。
+2、图像分割可以通过为物体指定其像素或找出物体之间的(或物体和背景之间的)边界的方法来实现。
-4 、在分割之前进行背景的平滑和噪声消除, 常常能改善分割的性能。 5 、阈值的大小应当根据图像的内容变化,除非背景灰度级和物体的对比度相对恒定。
+3 、灰度级阈值处理是一种总能产生闭合的连通边界的简单分割技术。
+
+4 、在分割之前进行背景的平滑和噪声消除, 常常能改善分割的性能。
+
+5 、阈值的大小应当根据图像的内容变化,除非背景灰度级和物体的对比度相对恒定。
6、具有简单物体以及与背景对比度明显的图像, 将阈值置于双峰直方图的低䏌可使物体面积对阈值变化的敏感度最小。
diff --git "a/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md" "b/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md"
index d69eb15..b1ca808 100644
--- "a/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md"
+++ "b/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md"
@@ -455,6 +455,7 @@ $$
$$
(\overset{n}{\underset{i=1}{Y}} X_i)\circ S\subseteq \overset{n}{\underset{i=1}{Y}}(X_i \circ S)
$$
+
$$
(\overset{n}{\underset{i=1}{Y}} X_i)\circ S \subseteq \overset{n}{\underset{i=1}{Y}}(X_i \bullet S)
$$
图5-4 几种典型的几何失真
diff --git "a/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md" "b/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md"
index 5b18a25..df6fb20 100644
--- "a/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md"
+++ "b/6 \345\233\276\345\203\217\347\232\204\345\207\240\344\275\225\345\217\230\346\215\242.md"
@@ -847,29 +847,17 @@ int nNewHeight=(long)(max(fabs(fDstY4-fDstY1), fabs(fDstY3-fDstY2))+0.5);
$$
T=T_{1} T_{2}=\left[\begin{array}{ccc}
-
1 & 0 & x_{1} \\
-
0 & 1 & y_{1} \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
1 & 0 & x_{2} \\
-
0 & 1 & y_{2} \\
-
0 & 0 & 1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & x_{1}+x_{2} \\
-
0 & 1 & y_{1}+y_{2} \\
-
0 & 0 & 1
-
\end{array}\right]\tag{6-7}
$$
@@ -881,29 +869,17 @@ $$
$$
T=T_{1} T_{2}=\left[\begin{array}{lll}
-
a_{1} & 0 & 0 \\
-
0 & d_{1} & 0 \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{lll}
-
a_{2} & 0 & 0 \\
-
0 & d_{2} & 0 \\
-
0 & 0 & 1
-
\end{array}\right]=\left[\begin{array}{lll}
-
a_{1} a_{2} & 0 & 0 \\
-
0 & d_{1} d_{2} & 0 \\
-
0 & 0 & 1
-
\end{array}\right]\tag{6-8}
$$
@@ -913,35 +889,20 @@ $$
$$
\begin{aligned}
-
T & =T_{1} T_{2}=\left[\begin{array}{ccc}
-
\cos \theta_{1} & \sin \theta_{1} & 0 \\
-
-\sin \theta_{1} & \cos \theta_{1} & 0 \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
\cos \theta_{2} & \sin \theta_{2} & 0 \\
-
-\sin \theta_{2} & \cos \theta_{2} & 0 \\
-
0 & 0 & 1
-
\end{array}\right] \\
-
& =\left[\begin{array}{ccc}
-
\cos \left(\theta_{1}+\theta_{2}\right) & \sin \left(\theta_{1}+\theta_{2}\right) & 0 \\
-
-\sin \left(\theta_{1}+\theta_{2}\right) & \cos \left(\theta_{1}+\theta_{2}\right) & 0 \\
-
0 & 0 & 1
-
\end{array}\right]
-
\end{aligned}\tag{6-9}
$$
@@ -966,13 +927,9 @@ $$
在这里还要说明一点, 为了提高双线性插值的速度, 双线性插值也可以分解为三个线性插值来实现, 公式如下:
$$
\begin{aligned}
-
& f(x, 0)=f(0,0)+x[f(1,0)-f(0,0)] \\
-
& f(x, 1)=f(0,1)+x[f(1,1)-f(0,1)] \\
-
& f(x, y)=f(x, 0)+y[f(x, 1)-f(x, 0)]
-
\end{aligned}\tag{6-10}
$$
@@ -989,29 +946,17 @@ $$
两个坐标系之间的坐标变换矩阵表达式为:
$$
\left[\begin{array}{c}
-
x_{\Pi} \\
-
y_{\Pi} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & -a \\
-
0 & -1 & b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x_{I} \\
-
-y_{I} \\
-
+{I} \\
1
-
\end{array}\right]
$$
@@ -1019,29 +964,17 @@ $$
$$
\left[\begin{array}{c}
-
x_{I} \\
-
y_{I} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & a \\
-
0 & -1 & b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x_{\Pi} \\
-
y_{\Pi} \\
-
1
-
\end{array}\right]
$$
@@ -1095,81 +1028,46 @@ y_{0} \\
\tag{6-11}
$$
-$$
-
-$$
其逆变换表达式为
$$
\left[\begin{array}{c}
-
x_{0} \\
-
y_{0} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
1 & 0 & -a \\
-
0 & -1 & b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
\cos \theta & \sin \theta & 0 \\
-
-\sin \theta & \cos \theta & 0 \\
-
0 & 0 & 0
-
\end{array}\right] \cdot\left[\begin{array}{ccc}
-
1 & 0 & -c \\
-
0 & -1 & d \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x \\
-
y \\
-
1
-
\end{array}\right]\tag{6-12}
$$
即
$$
\left[\begin{array}{c}
-
x_{0} \\
-
y_{0} \\
-
1
-
\end{array}\right]=\left[\begin{array}{ccc}
-
\cos \theta & \sin \theta & -c \cos \theta-d \sin \theta+a \\
-
-\sin \theta & \cos \theta & c \sin \theta-d \cos \theta+b \\
-
0 & 0 & 1
-
\end{array}\right] \cdot\left[\begin{array}{c}
-
x \\
-
y \\
-
1
-
\end{array}\right]\tag{6-13}
$$
@@ -1420,19 +1318,19 @@ BOOL CGeoTrans: : Transpose(CDibObject *pDibObject)
case 16:
nMovedBits = 2;
break;
-case 24:
- nMovedBits = 3;
- break;
-case 32:
- nMovedBits = 4;
- break;
+case 24:
+ nMovedBits = 3;
+ break;
+case 32:
+ nMovedBits = 4;
+ break;
}
- // 针对图像每行进行操作
- for(y = 0; y < nOldHeight; y++)
- {
- //指向源图像第y行
- pOldTemp = pOldBits;
- pOldTemp += (nOldHeight -1 -y) * nOldWidthBytes;
+ // 针对图像每行进行操作
+ for(y = 0; y < nOldHeight; y++)
+ {
+ //指向源图像第y行
+ pOldTemp = pOldBits;
+ pOldTemp += (nOldHeight -1 -y) * nOldWidthBytes;
// 针对每行图像每列进行操作
for(x = 0; x < nOldWidth; x++)
{
diff --git "a/7 \345\233\276\345\203\217\345\210\206\345\211\262.md" "b/7 \345\233\276\345\203\217\345\210\206\345\211\262.md"
index d6d9b68..7017844 100644
--- "a/7 \345\233\276\345\203\217\345\210\206\345\211\262.md"
+++ "b/7 \345\233\276\345\203\217\345\210\206\345\211\262.md"
@@ -344,7 +344,7 @@ $$
图 7-9 图像中不同类型的边界
(a)边界;
-(b) 线;
+(b) 线;
(c)折线变化;
(d)缓慢的平滑变化

@@ -455,7 +455,7 @@ $(x, y)$ 空间的同一条直线上的点在 $(\rho, \theta)$ 空间的正弦
1) 将 $(\rho, \theta)$ 空间量化, 得到二维矩阵 $M(\rho, \theta)$, $M(\rho, \theta)$ 是一个累加器, 初始值为 $0, M(\rho, \theta)=0$ 。
-2 ) 对边界上的每一个点 $\left(x_{i}, y_{i}\right)$, 将 $\theta$ 的所有量化值代入式 ( 7-2), 计算相应的 $\rho$, 并且将累加器加1, $M(\rho, \theta)=M(\rho, \theta)+1$ 。
+2) 对边界上的每一个点 $\left(x_{i}, y_{i}\right)$, 将 $\theta$ 的所有量化值代入式 ( 7-2), 计算相应的 $\rho$, 并且将累加器加1, $M(\rho, \theta)=M(\rho, \theta)+1$ 。
3) 将全部 $\left(x_{i}, y_{i}\right)$ 处理后, 分析 $M(\rho, \theta)$, 如果 $M(\rho, \theta) \geq T$, 就认为存在一条有意义的线段, 是该线段的拟合参数。 $T$ 是一个非负整数, 由图像中景物的先验知识决定。
@@ -467,7 +467,7 @@ $(x, y)$ 空间的同一条直线上的点在 $(\rho, \theta)$ 空间的正弦
1. 固定r, 首先将参数空间 $(a, b)$ 量化为等间隔的小区域, 然后针对超过给定阈值的所有边缘点, 对于每个(a,b)将其映射到的参数空间中的小区域中, 记数落到每个小区域的点数。最后, 取具有最大频度的若干小区域的参数作为圆特征的参数;
-2 . $r$ 取不同值, 重复第一步; 最大频度对应参数即为图象中圆参数。}
+2. $r$ 取不同值, 重复第一步; 最大频度对应参数即为图象中圆参数。}
@@ -475,9 +475,13 @@ $(x, y)$ 空间的同一条直线上的点在 $(\rho, \theta)$ 空间的正弦
1、图像分割是将一幅数字图像划分为不交叠的、连通的像素集的过程, 其中一个对应于背景, 其他的则对应于图像中的各个物体。
-2、图像分割可以通过为物体指定其像素或找出物体之间的(或物体和背景之间的)边界的方法来实现。 3 、灰度级阈值处理是一种总能产生闭合的连通边界的简单分割技术。
+2、图像分割可以通过为物体指定其像素或找出物体之间的(或物体和背景之间的)边界的方法来实现。
-4 、在分割之前进行背景的平滑和噪声消除, 常常能改善分割的性能。 5 、阈值的大小应当根据图像的内容变化,除非背景灰度级和物体的对比度相对恒定。
+3 、灰度级阈值处理是一种总能产生闭合的连通边界的简单分割技术。
+
+4 、在分割之前进行背景的平滑和噪声消除, 常常能改善分割的性能。
+
+5 、阈值的大小应当根据图像的内容变化,除非背景灰度级和物体的对比度相对恒定。
6、具有简单物体以及与背景对比度明显的图像, 将阈值置于双峰直方图的低䏌可使物体面积对阈值变化的敏感度最小。
diff --git "a/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md" "b/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md"
index d69eb15..b1ca808 100644
--- "a/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md"
+++ "b/8 \346\225\260\345\255\246\345\275\242\346\200\201\345\255\246.md"
@@ -455,6 +455,7 @@ $$
$$
(\overset{n}{\underset{i=1}{Y}} X_i)\circ S\subseteq \overset{n}{\underset{i=1}{Y}}(X_i \circ S)
$$
+
$$
(\overset{n}{\underset{i=1}{Y}} X_i)\circ S \subseteq \overset{n}{\underset{i=1}{Y}}(X_i \bullet S)
$$