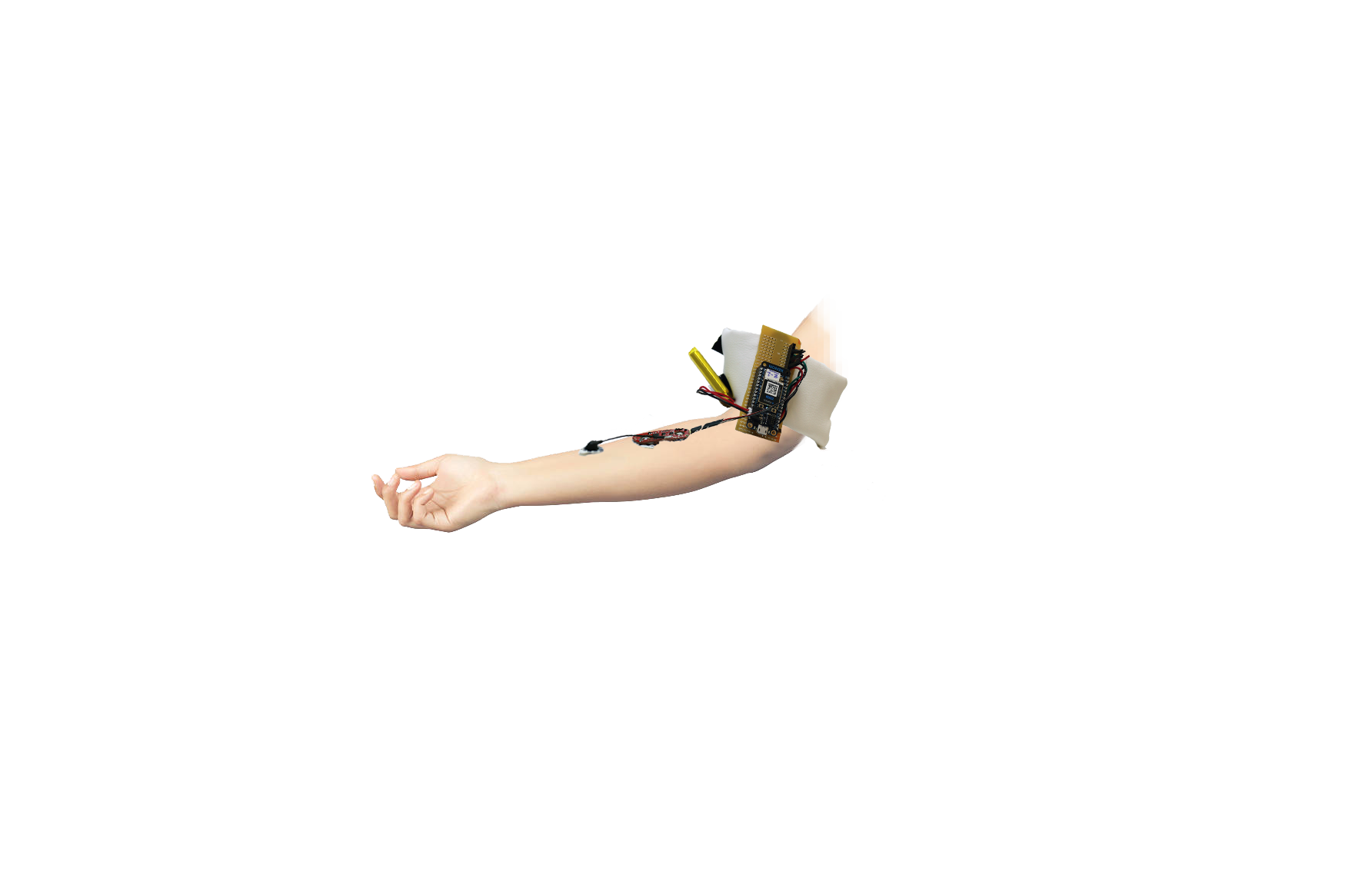
The body as the controller. A fully wearable EMG device strapped to the arm uses muscle flexion to manipulate the red color threshold of a real-time Kinect video feed — no buttons, no knobs, just movement. Video documentation of live actuation call-response here: https://vimeo.com/821194204

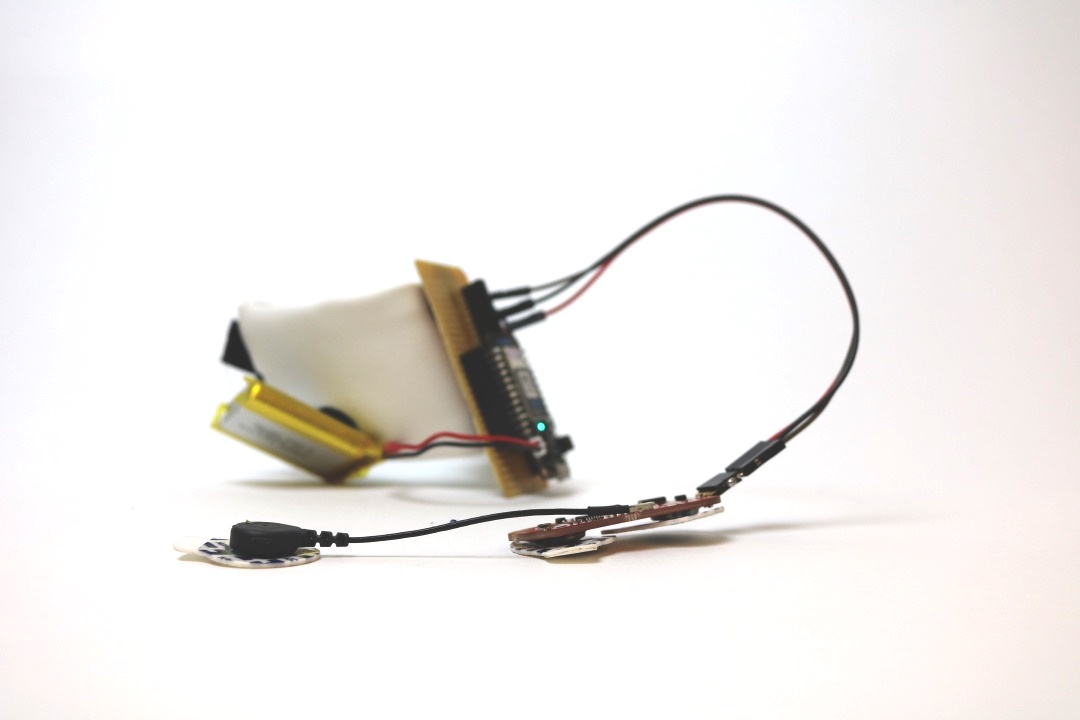
This project turns forearm muscle activity into a live video filter. A Particle Boron microcontroller reads an EMG (electromyography) sensor mounted at the wrist and forearm. That sensor data travels over LTE to the Particle Cloud API, where a Processing sketch polls it continuously via HTTP GET. The sketch simultaneously captures a depth-aware video stream from a Microsoft Kinect and uses the incoming muscle values to widen or narrow the red color threshold across every frame.
- Arm flexion inward (wrist and forearm pulling toward the body) → widens red surface area in the video
- Arm extension outward (forearm pulling away) → reduces red surface area
- The body itself mediates every visual result
┌─────────────────────────────────────────────────────┐
│ WEARABLE DEVICE │
│ │
│ [EMG Sensor] ──────► [Particle Boron (LTE)] │
│ │ │
│ [Li-ion Battery] │
└──────────────────────────────┼──────────────────────┘
│ publishes sensor data
▼
[Particle Cloud API]
│ REST / JSON
▼
[Processing Sketch]
HTTP GET polling
│ │
[Kinect v2]──┘ │
depth + colour feed │
▼
[Live Video Output]
red threshold controlled
by muscle flexion value
Data flow summary:
- EMG sensor samples muscle tension at the wrist/forearm
- Boron firmware publishes the value to the Particle Cloud over LTE
- Processing sketch issues HTTP GET requests to the Particle API, receiving JSON payloads
- The sketch reads the
resultvalue from the JSON and maps it to a color threshold range - Each Kinect frame is scanned pixel-by-pixel; red channel values above/below the threshold are boosted or suppressed
- The modified frame is drawn to the window in real time
| Component | Purpose |
|---|---|
| Particle Boron | LTE-connected microcontroller; publishes EMG readings |
| EMG / muscle sensor | Reads forearm flexion (analog signal) |
| Lithium-ion battery | Powers the Boron wirelessly — fully wearable |
| Microsoft Kinect v2 | Captures real-time depth and color video |
The Boron publishes sensor readings as a Particle variable, accessible via the REST API at:
GET https://api.particle.io/v1/devices/{DEVICE_ID}/{VARIABLE}
Authorization: Bearer {ACCESS_TOKEN}
The Boron firmware reads an analog pin connected to the EMG sensor and registers the value as a Particle Cloud variable. It samples continuously in loop() and the cloud handles read requests from any authorized client.
int sensorValue = 0;
void setup() {
Particle.variable("emgReading", sensorValue);
}
void loop() {
sensorValue = analogRead(A0);
delay(50);
}The main sketch handles two concerns in parallel:
1. API polling (HTTP GET)
import http.requests.*;
GetRequest get = new GetRequest(
"https://api.particle.io/v1/devices/" + DEVICE_ID + "/emgReading"
);
get.addHeader("Authorization", "Bearer " + ACCESS_TOKEN);
get.send();
JSONObject response = parseJSONObject(get.getContent());
int muscleValue = response.getInt("result");2. Kinect frame manipulation
The sketch ingests each Kinect color frame, then iterates over its pixels. The muscleValue from the API is mapped to a red threshold: pixels whose red channel exceeds the threshold are amplified; those below are dampened. The threshold is a live, continuously-updated value — so the video reacts in near real-time to what the wearer's arm is doing.
// Map muscle value (0–4095) to a threshold range
int redThreshold = (int) map(muscleValue, 0, 4095, 50, 200);
// Per-pixel pass
for (int i = 0; i < videoPixels.length; i++) {
color c = videoPixels[i];
int r = (int) red(c);
int g = (int) green(c);
int b = (int) blue(c);
if (r > redThreshold) {
videoPixels[i] = color(255, g, b); // boost red
} else {
videoPixels[i] = color(r / 2, g, b); // suppress red
}
}- Processing 3+ with:
HTTP Requests for Processinglibrary (Sketch → Import Library → Add Library)Open Kinect for Processinglibrary (Daniel Shiffman)
- Particle CLI for firmware flashing
- Particle account with a registered Boron device
- Microsoft Kinect v2 + USB adapter
Create a config.pde file (or edit the constants at the top of the main sketch):
String DEVICE_ID = "your_boron_device_id";
String ACCESS_TOKEN = "your_particle_access_token";- Flash the Boron firmware via Particle CLI:
particle flash --local firmware/muscle_sensor.ino
- Connect the Kinect via USB
- Open
sketch/MuscleVideoAffectation.pdein Processing and press Run
This device demonstrates that muscle activity can serve as a continuous, analog input channel — not a button press or a gesture, but a proportional signal that maps to any variable in a digital system. Some directions this opens up:
- Accessibility interfaces — proportional muscle control for users with limited motor range
- Biofeedback visualizations — turning physiological data into observable, real-time output
- Wearable performance art — the wearer's body becomes part of the visual composition
- Physical therapy — visual feedback on muscle engagement during rehabilitation exercises
- Game controllers — fatigue, tension, and recovery as in-game parameters
The hardware is low-cost, fully wireless, and runs on a battery that fits on the forearm — the entire sensing layer is self-contained.
.
├── firmware/
│ └── muscle_sensor.ino # Particle Boron firmware
├── sketch/
│ └── MuscleVideoAffectation.pde # Processing sketch (main)
└── README.md
- Processing — visual programming environment
- Particle Boron — LTE IoT microcontroller
- Particle Cloud API — device variable REST API
- OpenKinect for Processing — Kinect depth/color library
- HTTP Requests for Processing — HTTP client library
A wearable prototype exploring the potential of muscle sensing as a real-time creative interface.
A prototype exploring the potential of muscle sensing as a real-time creative interface. Using Particle hardtech (Particle Boron, a bluetooth microcontroller) to receive signal from muscle sense data in order to affect visual representation on Kinect webcam using using C#, integreting JSON GET Requests via Processing, bridging the Particle API.